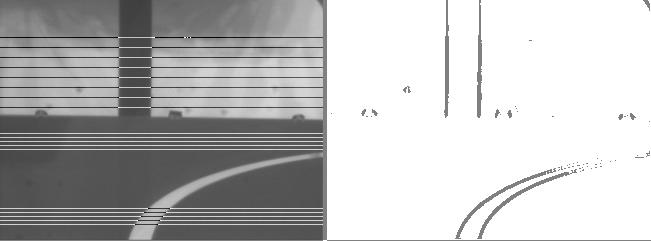
 Only a small number of lines (5-8) are processed in each of the three subimages,
to reduce computational load. The line processor outputs one of four possible
symbols: all_white, all_black, line or error. Lines whose slope is too small are
rejected as noise. Based on the sequential analysis of
the lines in the mirror subimage of the current frame, a state machine determines
the state of the robot: following_a_line, on_a_line_interruption or on_a_´final T´.
The information from the other subimages (whether a straight line or an interruption
is detected there) is used to accelerate/decelerate the vehicle and to make the
decision of going to the external portion of the track.
Only a small number of lines (5-8) are processed in each of the three subimages,
to reduce computational load. The line processor outputs one of four possible
symbols: all_white, all_black, line or error. Lines whose slope is too small are
rejected as noise. Based on the sequential analysis of
the lines in the mirror subimage of the current frame, a state machine determines
the state of the robot: following_a_line, on_a_line_interruption or on_a_´final T´.
The information from the other subimages (whether a straight line or an interruption
is detected there) is used to accelerate/decelerate the vehicle and to make the
decision of going to the external portion of the track.
|
|
|
|
|
|