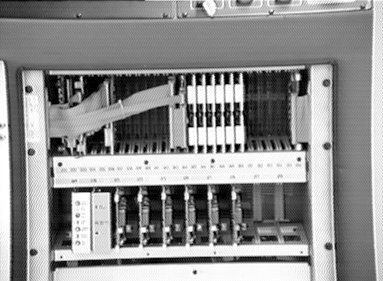
Original Unimate Mark III Controller Architecture
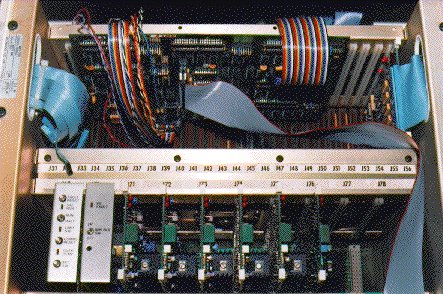
Current TRC004-based Control Architecture
The open control architecture is based on a PC network. Each PC of the network is responsible for a computation module (e.g. position control, image processing, task planning). The communication between PCs requires real-time multi-platform software.
All the developed functions are now usable as primitives for future developments, grouped in several appropriate libraries. People at the VA Rehab R&D Center in Palo Alto, California, USA, are using our libraries as a basis for their work using a PUMA 260 arm. We are starting the implementation of a task coordinator based on Petri nets, which will use some of those primitives.
Original Unimate Mark III Controller Architecture
Current TRC004-based Control Architecture
The TRC004 enables the transmission of digital commands (such as arm power-on, release brakes), direct readings of the 6 joint encoder values, a D/A to provide torques to the joint DC motors, and an A/D to read the 6 joint potentiometers for calibration purposes. It communicates with an external Pentium PC by a ribbon cable connected to a TRC006 (ISA-bus). Sampling rates up to 400 Hz were attained for both the motor current analog servo and the trajectory digital servo. Also available is an interface board for VME machines, not used at the moment.

Results of tests based on a cubic polynomial trajectory interpolator are available for:
The sampling rate for both tests was 200 Hz.This work was developed at ISR by Paulo Alvito, Nuno Martins and Nuno Moreira.
|
|
|
|
|
|