|
|
|
|
|
|
|
|
|
|
|
|
Descrição do Robô a Construir
O robô RODITAS será dotado de 4 sensores de detecção
de contacto e
um número variável de sensores de infravermelhos, que
lhe permitirão evitar
obstáculos, seguir pistas ópticas e afastar-se de um
objecto após uma colisão.
O sistema de tracção será baseado em duas rodas
independentes e uma
(ou duas) rodas de apoio. A estrutura mecânica será construída
baseada
em peças LEGO.
 Descrição do Sensor de Direcção
de Contacto
Descrição do Sensor de Direcção
de Contacto
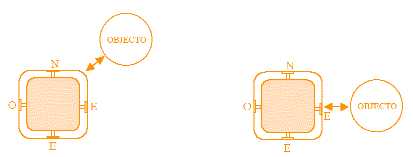
Na superfície do robô existirão quatro interruptores
de contacto, distribuídos
segundo o esquema da figura. Os sinais provenientes destes interruptores
entrarão num circuito lógico que distinguirá a direcção
de colisão.
Existirão, portanto, quatro entradas lógicas (Norte,
Este, Sul, Oeste) e oito saídas lógicas (Norte, NordEste,
Este, SudEste, Sul, SudOeste, Oeste, NorOeste).
A sinalização da direcção correcta faz-se
através da colocação da respectiva saída
a 1, ficando as restantes a 0.
Descrição do Sensor de Infravermelhos
O sensor de infravermelhos é constituído por um ou mais
pares de LEDs emissor/
receptor, semelhantes aos existentes nos telecomandos e televisores
domésticos. A
sua localização em pontos diferentes, consoante a aplicação
em vista, permitirá determinar a presença de um objecto na
proximidade do robô e/ou seguir uma
pista pintada no chão, através da análise de um
sinal digital ou analógico (ambos
disponíveis à saída do sensor).
 Tracção
Tracção
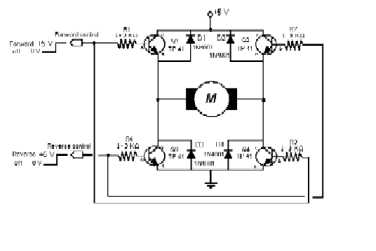
O RODITAS utiliza dois motores para movimentar independentemente duas
rodas de tracção - é pois baseado num modelo
de tracção diferencial. Para que
os motores tenham ?força? suficiente para movimentar as rodas,
deslocando o
peso do robô, é necessário um amplificador de potência.
O esquema geralmente
utilizado para este fim é baseado numa ponte H que, com uma
só tensão de alimentação, permite movimentos
das rodas nos dois sentidos.
Nova
Estrutura do Roditas II


 Novos Sensores e Nova Apresentação
Novos Sensores e Nova Apresentação
 Linha de 6 emissores e 6 receptores de infravermelhos
Linha de 6 emissores e 6 receptores de infravermelhos
 MicroControlador a Bordo
MicroControlador a Bordo
  Filmes do RODITAS a seguir uma linha preta num fundo
branco.
Metade da Pista: RODITAS
1 (4 Mb)
Pista Completa : RODITAS
2 (7.5 Mb)
Filmes do RODITAS a seguir uma linha preta num fundo
branco.
Metade da Pista: RODITAS
1 (4 Mb)
Pista Completa : RODITAS
2 (7.5 Mb)
|